



2020-2021
Global Indoor Navigation Research Project
Self-learning global indoor navigation that works in all buildings
- Accurate positioning with <1m median error (ANN, RTT techniques)
- Self-learning indoor maps, paths and structures
- Automatic building feature identification (elevators, stairs, entrances)
- Article to IPIN 2022 Barcelona
- 1 patent application

2015
Indoor 3D Research Project
- Indoor 2.5D SLAM crowdsourcing algorithms with sensor fusion: <10m median error, >95% correct floor
- Articles for CVPR, Las Vegas, and IPIN, Madrid.
- 2 Patents

2015
2014
Indoor GPS Research Project
- Inomhus 2D SLAM crowdsourcing algorithms: <20m median error
- Best paper award IPIN 2015, Calgary
- 1 Patent
Indoor positioning with GPS only

Indoor positioning with CPS Indoor



Latest Research News
 https://combain.com/wp-content/uploads/2022/01/Skarmbild-2022-01-04-163252.png
1918
3778
Combain
https://combain.com/wp-content/uploads/2020/09/Combain_Logo_340x156px_transparent_back-1-300x138.png
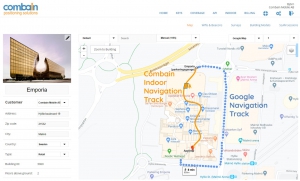
Combain2021-12-23 12:46:002022-01-04 18:24:26GIN Phase 5 (last) – Putting it all together: Creating a Global Indoor Navigation demo system
https://combain.com/wp-content/uploads/2022/01/Skarmbild-2022-01-04-163252.png
1918
3778
Combain
https://combain.com/wp-content/uploads/2020/09/Combain_Logo_340x156px_transparent_back-1-300x138.png
Combain2021-12-23 12:46:002022-01-04 18:24:26GIN Phase 5 (last) – Putting it all together: Creating a Global Indoor Navigation demo system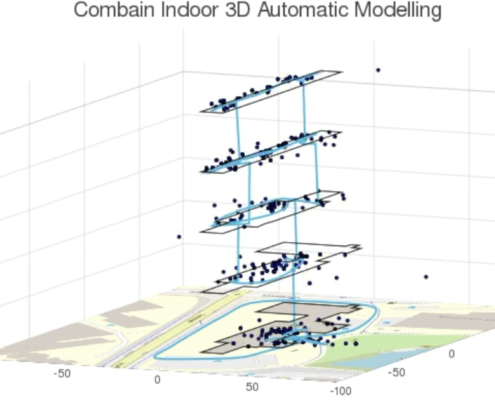 https://combain.com/wp-content/uploads/2021/10/Skarmbild-2021-10-21-134502.png
1830
2780
Combain
https://combain.com/wp-content/uploads/2020/09/Combain_Logo_340x156px_transparent_back-1-300x138.png
Combain2021-06-01 13:40:002022-01-04 18:25:12GIN Phase 4 – Multi Floor Buildings and Artificial Neural Network Positioning
https://combain.com/wp-content/uploads/2021/10/Skarmbild-2021-10-21-134502.png
1830
2780
Combain
https://combain.com/wp-content/uploads/2020/09/Combain_Logo_340x156px_transparent_back-1-300x138.png
Combain2021-06-01 13:40:002022-01-04 18:25:12GIN Phase 4 – Multi Floor Buildings and Artificial Neural Network Positioning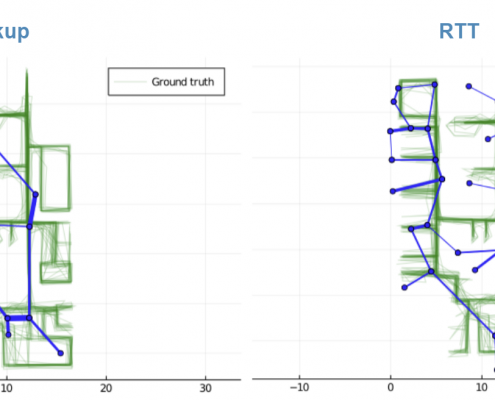 https://combain.com/wp-content/uploads/2021/05/Skarmbild-2021-05-21-173310.png
656
3078
Combain
https://combain.com/wp-content/uploads/2020/09/Combain_Logo_340x156px_transparent_back-1-300x138.png
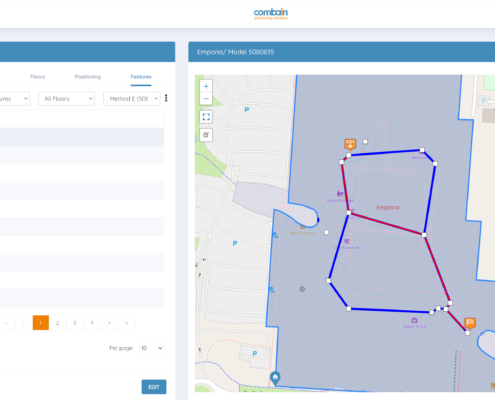
Combain2020-12-17 17:27:002022-01-04 18:25:27GIN Phase 3 – Automatic Route Extraction
https://combain.com/wp-content/uploads/2021/05/Skarmbild-2021-05-21-173310.png
656
3078
Combain
https://combain.com/wp-content/uploads/2020/09/Combain_Logo_340x156px_transparent_back-1-300x138.png
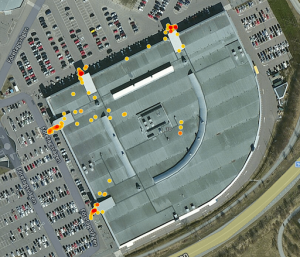
Combain2020-12-17 17:27:002022-01-04 18:25:27GIN Phase 3 – Automatic Route Extraction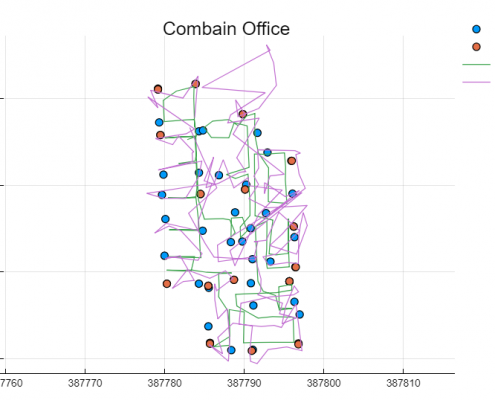 https://combain.com/wp-content/uploads/2020/10/CombainOfficeRTTTracks.png
538
797
Combain
https://combain.com/wp-content/uploads/2020/09/Combain_Logo_340x156px_transparent_back-1-300x138.png
Combain2020-10-07 19:06:372021-10-21 13:06:39GIN Phase 2 – Generating first paths and towards 1m accuracy
https://combain.com/wp-content/uploads/2020/10/CombainOfficeRTTTracks.png
538
797
Combain
https://combain.com/wp-content/uploads/2020/09/Combain_Logo_340x156px_transparent_back-1-300x138.png
Combain2020-10-07 19:06:372021-10-21 13:06:39GIN Phase 2 – Generating first paths and towards 1m accuracy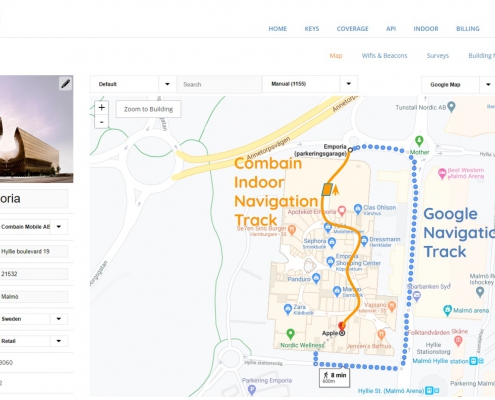 https://combain.com/wp-content/uploads/2020/10/GIN_map.jpg
927
1536
Combain
https://combain.com/wp-content/uploads/2020/09/Combain_Logo_340x156px_transparent_back-1-300x138.png
Combain2020-07-03 16:44:002022-01-04 18:25:52GIN Phase 1 – Preparations and initial development
https://combain.com/wp-content/uploads/2020/10/GIN_map.jpg
927
1536
Combain
https://combain.com/wp-content/uploads/2020/09/Combain_Logo_340x156px_transparent_back-1-300x138.png
Combain2020-07-03 16:44:002022-01-04 18:25:52GIN Phase 1 – Preparations and initial development https://combain.com/wp-content/uploads/2020/03/VinnovaAnnouncement.png
400
1125
Combain
https://combain.com/wp-content/uploads/2020/09/Combain_Logo_340x156px_transparent_back-1-300x138.png
Combain2020-03-25 16:14:002020-10-07 16:26:09Combain receives research funding for Global Indoor Navigation research from Vinnova
https://combain.com/wp-content/uploads/2020/03/VinnovaAnnouncement.png
400
1125
Combain
https://combain.com/wp-content/uploads/2020/09/Combain_Logo_340x156px_transparent_back-1-300x138.png
Combain2020-03-25 16:14:002020-10-07 16:26:09Combain receives research funding for Global Indoor Navigation research from Vinnova